4. Dynamic Problems
4.1. Cable-Stayed Bridge
Folder: $B2EXAMPLES/dynamic/bridge
The lowest eigenfrequencies and their corresponding eigenmodes of a cable-stayed steel-concrete composite bridge are calculated. A global FE model of the structure, with shell and beam elements, has been established. Although the problem of cable-stayed structures is geometrically non-linear it is approximated here by replacing the cable by beams with a given prestress.
The FE model of the Zaltbommel bridge in the Netherlands has been elaborated by the NLR, the mesh consisting of R.S rods, B2.S.RS beams, and Q4.S.MITC quad shell elements. The rod and beam elements refer to steel, whereas the shell elements refer to concrete.
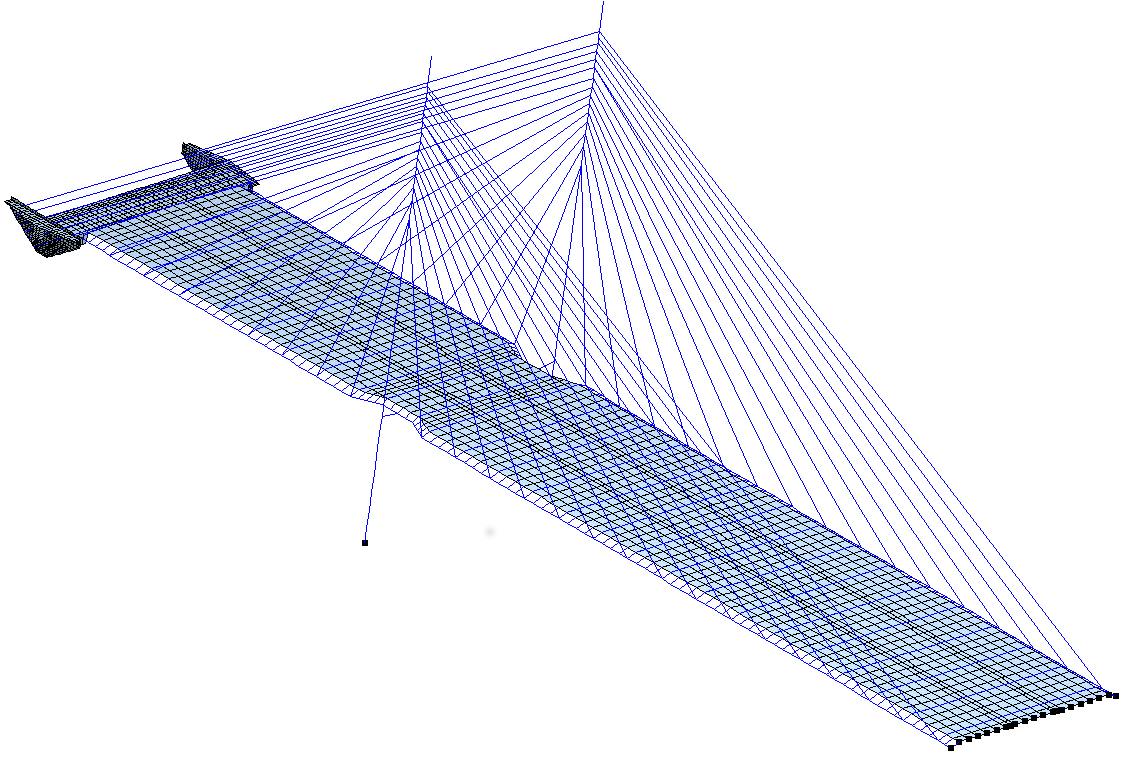
FE mesh.
The free vibration analysis with B2000++ is controlled with the MDL
commands adir and case, requesting the 20 lowest eigenfrequencies:
case 1
analysis free_vibration
nmodes 20
ebc 1
end
adir
case 1
end
The cases option of adir specifies which cases B2000++ should
process (here: process case 1). In its turn, the case 1
description in the cases command specifies the analysis type and
other options related to that particular type of analysis:
The
analysisoption ofcaseindicates the type of analysis to be performed.free_vibrationwill launch the B2000++ free vibration analysis solver (see also comment below).The
nmodesoption specifies the number of eigenmodes or eigenvalues to be computed. In the absence of a shift the smallestnmodeseigenvalues around 0.0 are computed.
By default B2000++ calculates the real symmetric eigenvalue problem
with the Implicitly Restarted Lanczos Iteration variant of the
Implicitly Restarted Arnoldi Iteration algorithm implemented in the
ARPACK, the ARnoldi PACKage
library. In addition, the model mass and modal stiffness for each mode
are computed. Results are summarized below, printed with the
print_eigenfrequencies.py script. Alternatively, results can be
displayed with the b2browser application.
prompt> b2print_eigenfrequencies zaltbommel
Free vibration eigenfrequencies, case=1, cycle=0
Spectral shift=0, where="SM (around the shift value)", Termination=NORMAL
Mode lambda Omega Frequency Modal_K Modal_M
1 7.216 2.686 0.4275 7.216 1
2 7.634 2.763 0.4397 7.634 1
3 16.2 4.025 0.6407 16.2 1
4 19.13 4.374 0.6961 19.13 1
5 19.4 4.404 0.701 19.4 1
6 27.51 5.245 0.8348 27.51 1
7 36.23 6.019 0.9579 36.23 1
8 53.11 7.288 1.16 53.11 1
9 58.47 7.647 1.217 58.47 1
10 61 7.81 1.243 61 1
Results can be rendered directly with the baspl++ viewer. Eigenmodes
are visualized either with baspl++’s built-in modes viewing tool. The
viewer script view.py produces the plot shown below:
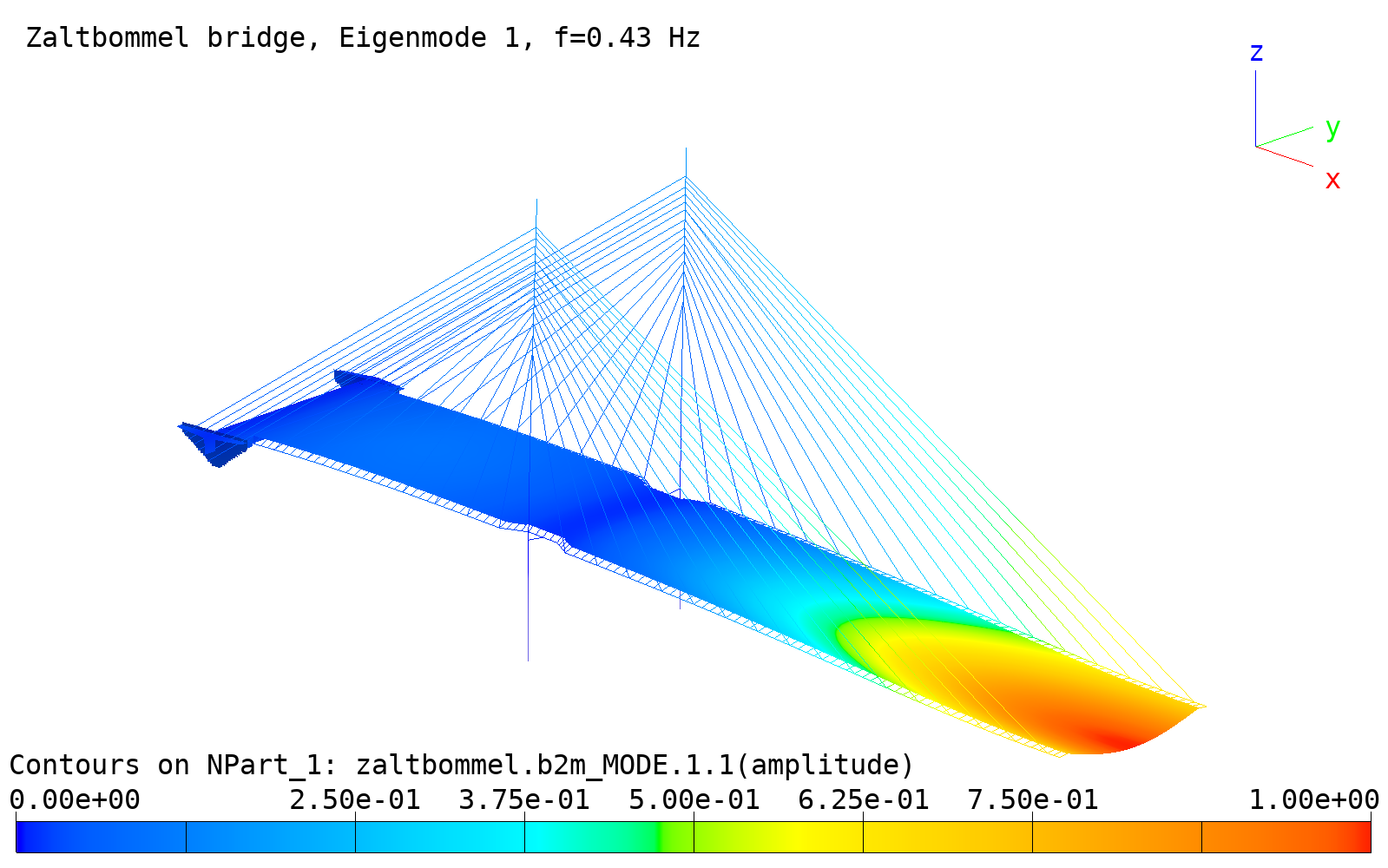
First fundamental free vibration mode no. 1.
Any other mode i can be rendered with the baspl++ function mode
(see below):
mode(i)
view.py also provides a function for producing plots of several
modes:
def mode(imode):
"""Render mode 'imode' (int).
"""
m2.field.ch.mode = imode
f = m.db["MODE.1.0.0.1.{}".format(imode)].desc["FREQ"][0]
s.label = 'Zaltbommel bridge, Eigenmode {}, f={:.2f} Hz'.format(imode, f)
def images(i,j):
"""Render modes from `i` to `j` in ``png`` files.
"""
for k in range(i, j+1):
mode(k)
s.export_to_file("mode{:03d}.png".format(k))
Calling the above defined function
images(1,8)
from the baspl++ shell will render modes 1 to and produce 8 png
files mode001.png to mode008.png that can be assembled
to one single plot with the montage application:
montage *.png -scale 33% -mode Concatenate -tile 2x8 montage.png
producing
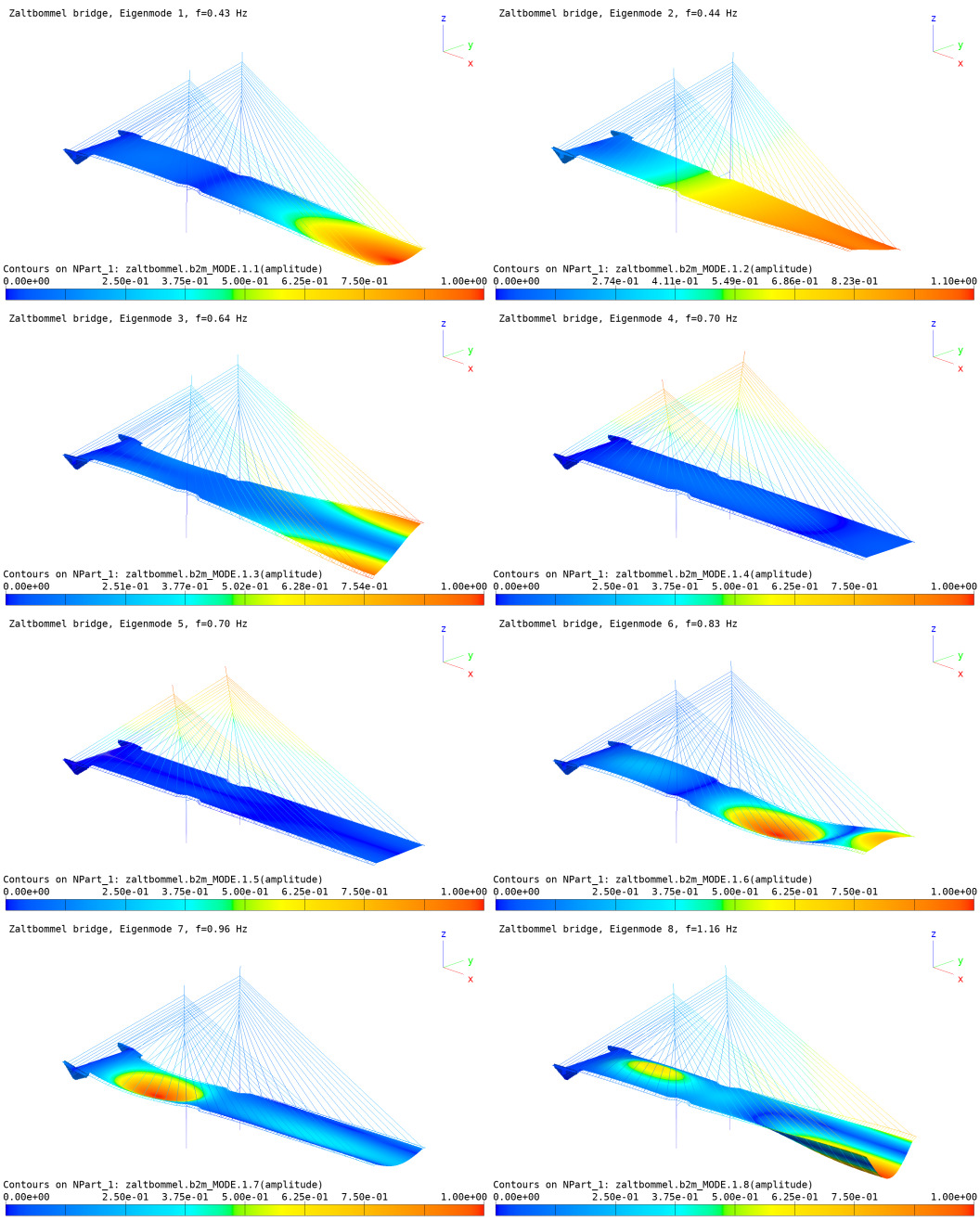
Modes 1 to 8 assembled in one single plot with the montage application.
4.2. One-DOF Oscillator
Folder: $B2EXAMPLES/dynamic/one_dof_oscillator
This transient test case is the simplest possible test - a one-DOF oscillator. The test case checks the response over a time interval for applied initial displacement, applied initial velocity, force consatnt over time, and sinusoidal force over time.
The oscillator is modeled with a single rod element of length
\(L\), cross section area \(A\), and modulus of elasticity
\(E\). Node 1 of the rod is fixed, and node 2 moves in
x-direction. The mesh, the material, and the constraints are defined
in MDL file r2.mdl:
nodes
1 0. 0. 0.
2 (L) 0. 0.
end
elements
type R2.S
mid 1
area (A)
1 1 2
type PMASS3.S
mass (MASS)
100 2
end
material 1
type isotropic e (E) p 0.0 density 0.0
end
ebc 1 # Constraints (zero value boundary conditions)
value 0. dof 1/3 nodes 1 dof 2/3 nodes 2
end
Test are performed with the dynamic nonlinear solver, because the dynamic linear solver is too restrictive (see comment). Since displacements are very small the solution will be very close to the linear analytical solution.
All cases define the same MDL case block:
case 1
analysis dynamic_nonlinear
tol_dynamic 1e10 # = no time integration error control
stage 11 sfactor (T) # Here we go from time=0.0 to time=T
end
4.2.1. Initial Displacement
Specifying an initial displacement at time=0.0 will create an
oscillation with an amplitude equal to the initial
displacement. initial_displacement.mdl formulates the case
(see comments), with the initial condition defined as
# Initial condition to be included in analysis at time=0.0, i.e for
# the first stage. Assign initial displacement to DOF 1 of node 2.
dof_init 123
value (DOF_INIT) dof 1 node 2
end
and the corresponding stage (see case block above) defining the initial displacement set:
stage 11
ebc 1
dof_init 123 # Initial condition at time=0.0
step_size_init (DT) # Must be defined if sfactor != 1.0
step_size_min (0.01*DT) # Must be defined if sfactor != 1.0
step_size_max (DT) # Must be defined if sfactor != 1.0
end
The case is launched with the Python script
test_initial_displacment.py which produces the plot file
initial_displacement.png:
python3 initial_displacement.py
Displacement and velocity diagrams for the oscillator are generated
with the plot function of util.py.
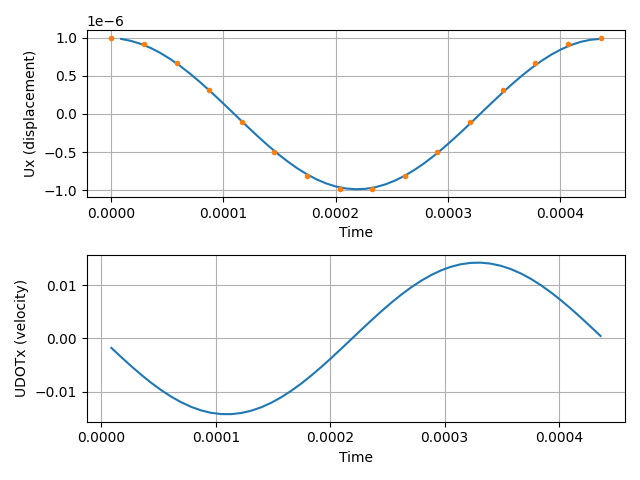
Displacement and velocity diagrams (orange: analytical solution).
4.2.2. Initial Velocity
Specifying an initial velocity at time=0.0 will induce a sinusoidal
oscillation. initial_velocity.mdl formulates the case, with
the initial condition defined as
# Initial time-derivative condition to be included in analysis at
# time=0.0, i.e for the first stage. Assign initial velocity
# to DOF 1 of node 2.
dofdot_init 123
value (UDOT0)
node 2
end
and the corresponding stage defining the initial velocity set:
stage 11
ebc 1
dofd_init 123 # Initial time-derivative condition at time=0.0
step_size_init (DT) # Must be defined if sfactor != 1.0
step_size_min (0.01*DT) # Must be defined if sfactor != 1.0
step_size_max (DT) # Must be defined if sfactor != 1.0
end
The case is launched with the Python script
test_initial_velocity.py which produces the plot file
initial_velocity.png:
python3 initial_velocity.py
Displacement and velocity diagrams for the oscillator are generated
with the plot function of util.py.
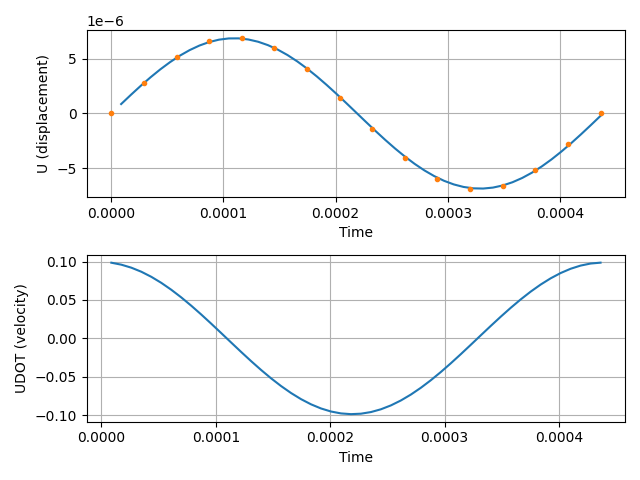
Displacement and velocity diagrams (orange: analytical solution).
4.2.3. Constant (Step) Force
A constant force \({F_x}\) defined in nbc set 1 (see
r2.mdl) is applied to node 2. The force is constant over the
time interval. The corresponding stage
specifies the (constant) sfunction as 1, see
constant_force.mdl):
stage 11
ebc 1
nbc 1 sfunction '1'
step_size_init (DT) # Must be defined if sfactor != 1.0
step_size_min (0.01*DT) # Must be defined if sfactor != 1.0
step_size_max (DT) # Must be defined if sfactor != 1.0
end
The case is launched with the Python script test_constant_force.py
which produces the plot file constant_force.png:
python3 constant_force.py
Displacement and velocity diagrams for the oscillator are generated
with the plot function of util.py.
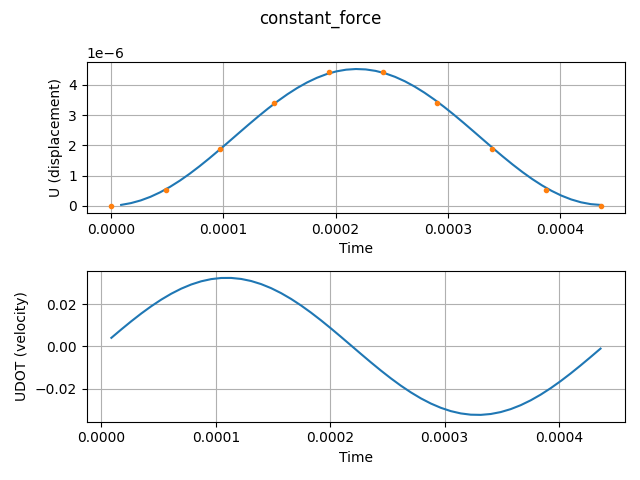
Displacement and velocity diagrams (orange: analytical solution).
4.2.4. Forced Vibration
A sinusoidal force \(F_x=\sin{\overline{\omega} t}\), with
\(\overline{\omega}=0.667\omega\) and circular frequency
\(\omega=\frac{AE}{L}\), is applied to node 2. The corresponding
stage specifies the sfunction as
sin(9601.1*t), see forced_vibration.mdl):
stage 11
ebc 1
nbc 1 sfunction 'sin(9601.1*t)'
step_size_init (DT) # Must be defined if sfactor != 1.0
step_size_min (0.01*DT) # Must be defined if sfactor != 1.0
step_size_max (DT) # Must be defined if sfactor != 1.0
end
The case is launched with the Python script test_forced_vibration.py
which produces the plot file forced_vibration.png:
python3 forced_vibration.py
Displacement and velocity diagrams for the oscillator are generated
with the plot function of util.py.
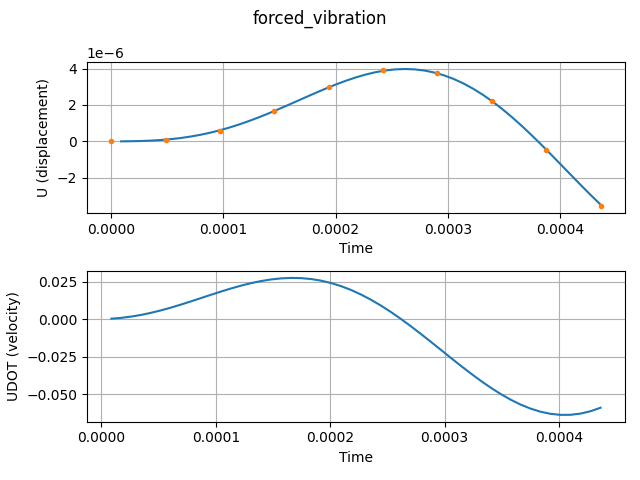
Displacement and velocity diagrams (orange: analytical solution).
4.3. Linear Transient Analysis of Beam
Folder: $B2EXAMPLES/dynamic/simple_beam
A simply supported beam is loaded by a central load P applied at time
t=0 (see also input file beam.mdl). The model has been chosen such
that the response under the given loads is linear and the beam
thickness to beam length ratio is small, thus rendering the influence
of the shear strain negligible. A theoretical transient solution for
this configuration is available, formulated with the Euler beam theory
[clough]:
where i is the odd (symmetric around \(y = L/2\)) mode number, E the modulus of elasticity, I the moment of inertia around the bending axis, m the beam mass per length unit, and L the length of the beam, and \(Ft(t) = P_0\).
The force is applied at \(t=0\) and kept constant. The beam as
displayed below is modeled with B2.S.RS beam elements, see MDL input
file beam.mdl.

Beam model.
Three different analyses will be carried out: A static analysis, a free-vibration analysis, and a transient analysis. Hence, three different analysis cases will be defined. All three cases refer to the same essential boundary conditions (MDL)
ebc 1
# Eliminate dof's 3,4,5
value 0.0 dof [UZ RX RY] allnodes
# Support
value 0.0 dof [UX UY] epatch 1 P1 dof 2 epatch 1 P2
end
Natural boundary conditions will be applied to the static and transient dynamic analysis:
nbc 1
value 1000. dof UY node 21
end
The static analysis case 1 includes both the essential and the natural boundary conditions defined above:
case 1
analysis linear
nbc 1
ebc 1
end
A free vibration analysis gives an idea about the frequencies to be expected, at the same time checking the free vibration analysis solution and preparing the input for the modal analysis (see the text book by Clough and Penzien [clough]). Theoretical free vibration modes and their corresponding circular frequencies \(\omega\) are available with
The free vibration analysis case is defined by specifying the essential boundary condition set and the number of (lowest) eigenvalues to be computed:
case 2
analysis free_vibration
nmodes 10
ebc 1
end
The free vibration analysis solution is obtained by explicitly
requiring case 2 in the adir command:
adir
case 2
end
Eigenvalues are obtained by executing b2000++ and by printing them
with the Simples print_eigenfrequencies.py script:
$ b2print_eigenfrequencies --case=2 beam
Eigenfrequencies, case 2
Mode Frequency Omega Modal_K Modal_M
1 10.5 65.96 625.2 2.72e+06
2 41.81 262.7 404.6 2.792e+07
3 93.42 587 184.7 6.363e+07
4 144.9 910.6 624.8 5.181e+08
5 164.5 1034 107.7 1.15e+08
6 254.1 1597 71.99 1.835e+08
7 361.1 2269 52.58 2.706e+08
8 435 2733 623.6 4.658e+09
9 484.2 3043 40.84 3.78e+08
10 622.6 3912 33.19 5.078e+08
Note that the theoretical circular eigenfrequencies are derived from an Euler beam model. Thus, the shear, which has a certain influence for the present model (although the beam is slender), is not taken into account and explains small differences between theoretical and calculated circular eigenfrequencies.
While the modal solver takes the damping coefficients of each mode \(\zeta\) for the model from the argument list, the transient solver requires the Rayleigh damping coefficients (see [bathe1996] \(\alpha\) and \(\beta\) to be defined:
\(\omega\) and \(\zeta\) are the circular frequencies and the damping percentage, respectively.
The B2000++ transient solver and the modal analysis script msolve are executed without damping or with 10% damping, see the Makefile in the examples directory. The damped transient analysis eventually converges to the static solution, given a damping coefficient >0. The modal analysis test selects the first 3 eigenvalues.
With circular frequencies available from the free vibration analysis, the modal transient analysis can be performed, either with the b2modal program or with the python script msolve (see example directory):
./msolve ${NELEM} ${MIDSTATION} ${T1} ${NSTEPS} 0.0
msolve calls the Simples Modal Transient Solver.
The time response curve for the beam mid-station y displacement Uy
(10% damped response) is obtained with the Simples script
plot_time_history (see Makefile in the example
directory). It produces the svg file dy.svg:

Modal transient analysis: Time-displacement response, no damping.

Modal transient analysis: Time-displacement response, 10% damping.
A linear transient analysis without damping or with Rayleigh damping
is defined in case3, which is split in the effective case
definition (case 3) and the stage definition (case 31). Adding
a stage is necessary for specifying the time range (time_step):
case 3
title 'Transient analysis'
stage 31 time_step (T)
end
stage 31 integrates from time 0.0 to T, T being a
parametrized value (see file beam.mdl).
The stage in its turn defines conditions of the stage:
stage 31
nbc 1 sfunction '1.'
ebc 1
step_size (DT)
end
nbc 1 sfunction '1.'includes the nbc set 1, scaling it to
1.0 for the whole stage. ebc 1 includes the nbc set 1, keeping
it constant during the stage
(default). multistep_integration_order selects the time
integration scheme, here of order 2. step_size defines the time
step or increment, (DT) being a parametrized value.
The transient analysis solution is obtained by explicitly requiring
case 3 in the adir command:
adir
case 3
end

Direct transient analysis: Time-displacement response, no damping.

Direct transient analysis: Time-displacement response, 10% Rayleigh damping.
The shell command
make all
executes all damped/non-damped tests with the direct transient and the modal solvers and produces csv files. These can then be combined to comparison plots. Example:
b2plot_csv --l=center --width=150. --height=50. modal_0.0.csv transient.csv
produces the comparison plot

Compare linear modal and transient curves, mid-station DY displacement, no damping.
and
b2plot_csv --l=center --width=150. --height=50. modal_0.1.csv transient_10.csv
produces the comparison plot

Compare linear modal and transient curves, mid-station DY displacement, 10% damping.
4.4. Free Vibration of Unconstrained Beam
Folder: $B2EXAMPLES/dynamic/unconstrained_vibration
The lowest eigenfrequencies of an unconstrained straight beam are computed. When one tries to solve the eigenvalue problem \(K x = \lambda M x\) of an unconstrained structure the procedure usually fails, unless a spectral shift \(\sigma\) is applied:
The straight slender beam is 100cm long and has a solid rectangular cross section of width=0.3cm by height=1cm. Material is aluminum. Units are formulated in the MKS system.
Tests are performed with B2.S.RS and B3.S.RS beam elements. As
expected the eigenvalue analysis procedure fails without a spectral
shift. However, with a small shift the procedure works. The run with
B2.S.RS elements produces the following 10 first eigenvalues:
Free vibration eigenfrequencies, case=1, cycle=0
Spectral shift=1, where="SM (around the shift value)", Termination=NORMAL
Mode lambda Omega Frequency Modal_K Modal_M
1 -4.99227e-05 0 0 0 0
2 -1.95039e-05 0 0 0 0
3 -1.60658e-05 0 0 0 0
4 -1.41603e-05 0 0 0 0
5 -1.25672e-05 0 0 0 0
6 -1.14704e-05 0 0 0 0
7 9860.68 99.3009 15.8042 0.000964875 9.51432
8 74981.7 273.828 43.5811 0.00033697 25.2666
9 109497 330.904 52.665 0.00096561 105.732
10 288504 537.126 85.4862 0.000171843 49.5775
Note that the first 6 eigenmodes are rigid body modes (negative eigenvalues \(\lambda\)) and they are the only ones found to the left of the shift. Mode 7 and 9 (see figure below) are the first fundamental modes around the z-axis and the y-axis. The eigenfrequencies agree well with the theoretical values obtained from [Roark] (table 16.1, uniform beam, both ends free).
where \(c=22.4\) for the first fundamental mode.
Mode |
B200++ |
Analytical |
|---|---|---|
7 (bending around global z-axis) |
15.80 |
15.821 |
9 (bending around global y-axis) |
52.67 |
52.737 |
The baspl++ script view.py produces plots (png files) of the first
10 eigenmodes.
baspl++ -t view.py beam.b2m
The plots can be merged into on single png file
montage.png with the Linux montage program:
montage mode*.png -scale 33% -mode Concatenate -tile 2x5 montage.png
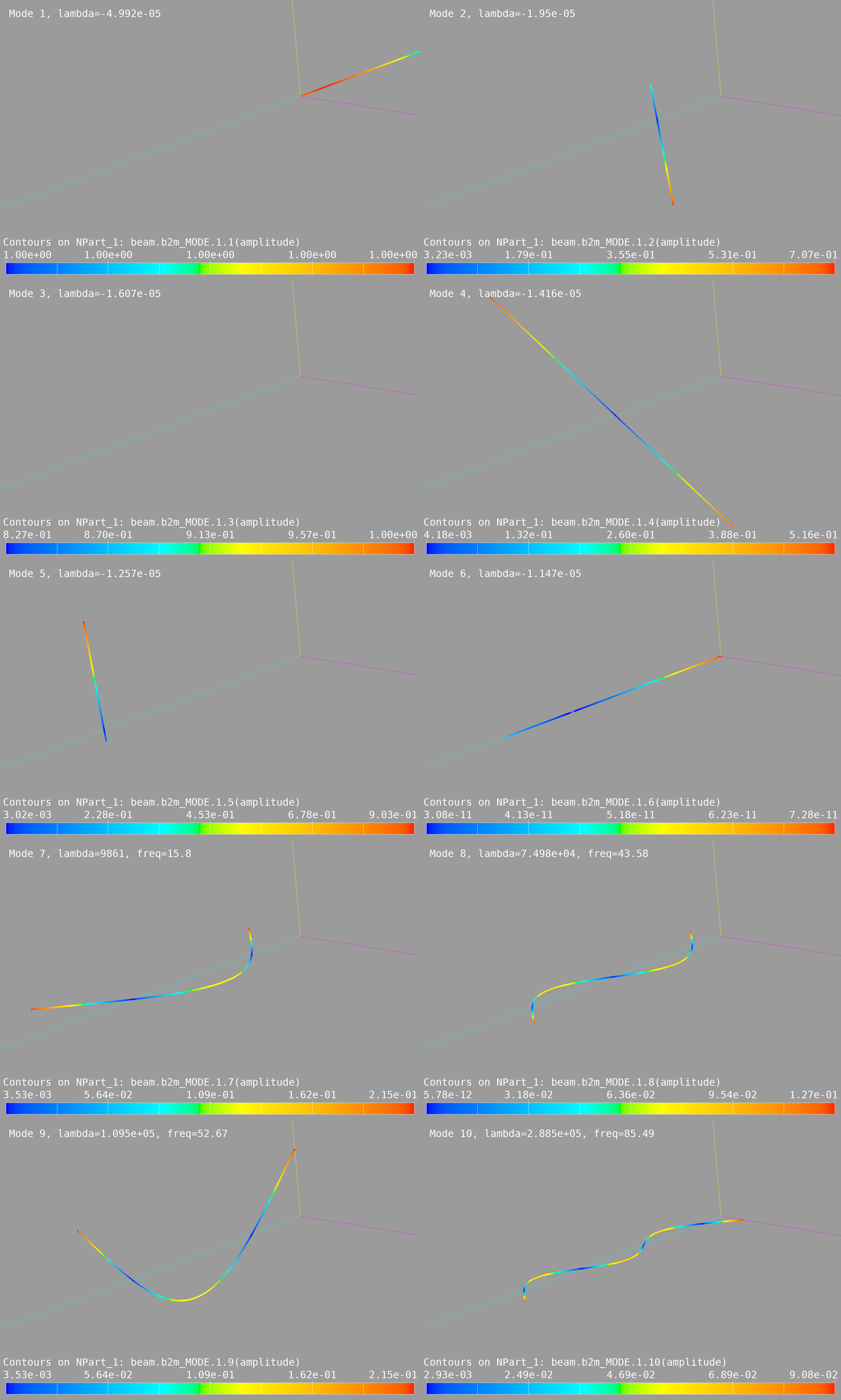
Unconstrained beam: First 10 eigenmodes.